







;)
;)

 이미지 확대보기
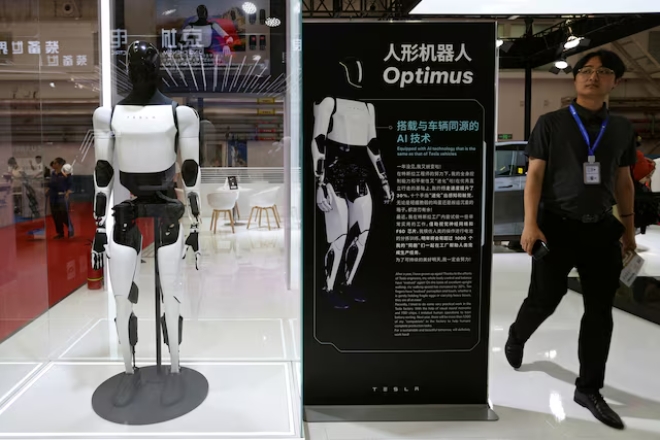
이미지 확대보기테슬라가 휴머노이드 로봇 옵티머스의 훈련 방식을 대폭 변경했다고 비즈니스인사이더가 26일(이하 현지시각) 보도했다.
비즈니스인사이더에 따르면 테슬라는 지난 6월 말 직원들에게 보낸 메모에서ㅓ 기존의 모션 캡처 슈트와 원격 조종(텔레오퍼레이션)을 활용한 방식 대신에 주로 카메라 영상만 활용하는 ‘비전 온리(vision-only)’ 전략으로 전환한다고 밝혔다.
테슬라는 그동안 작업자가 슈트와 VR 헤드셋을 착용해 동작을 기록하거나 로봇을 직접 조종하는 방법으로 데이터를 수집했다. 그러나 최근에는 직원들이 특정 작업을 수행하는 장면을 여러 대의 카메라로 촬영해 이를 로봇 훈련에 활용하는 방식을 택했다. 테슬라는 이같은 전환이 데이터 수집을 더 빠르게 확장할 수 있게 한다는 입장이다.
이같은 변화는 옵티머스 프로그램 디렉터였던 밀란 코바치가 물러난 직후 이뤄졌으며 현재는 테슬라 AI 디렉터 아쇼크 엘루스와미가 프로젝트를 이끌고 있다고 비즈니스인사이더는 전했다.
업계 전문가들은 테슬라의 접근법이 자율주행차 훈련 방식과 유사하다고 분석했다. 다른 완전 자율주행 업체들이 라이다와 레이더 센서를 사용하는 반면, 테슬라는 카메라 데이터만으로 자율주행 소프트웨어를 훈련시켜왔다.
플로리다 A&M-플로리다 주립대 공학부의 크리스천 후비치 로보틱스 연구소장은 테슬라의 다각도 카메라 시스템이 "관절이나 손가락 위치 같은 세부 움직임을 더 정밀하게 포착할 수 있다"고 평가했다. 반면 미국 오리건주립대의 AI·로보틱스 전문가 앨런 펀은 “운전은 단일 작업이지만 로봇은 영상을 통해 실제로 행동을 이해하고 수행해야 한다”며 훈련 난이도가 훨씬 높다고 지적했다.
일론 머스크 테슬라 최고경영자(CEO)는 지난 1월 실적발표에서 "옵티머스 훈련에 필요한 데이터 규모는 자율주행차의 최소 10배 이상이 될 것"이라고 언급한 바 있다.
옵티머스 프로젝트는 지난 2021년 머스크가 처음 공개했으며 공장 노동이나 돌봄 서비스 등 다양한 역할을 수행할 수 있는 범용 로봇을 목표로 하고 있다.
김현철 글로벌이코노믹 기자 rock@g-enews.com














{kind=link}