







;)
;)

천연 방사선 차단막 갖춘 지하 터널 주목…스마트 로봇 3대 투입으로 한계 극복
매핑부터 3D 지도 제작까지 '자율 탐사 4단계' 수립…실제 지형 테스트로 검증 완료
독일·스페인 컨소시엄 기술력 입증…자율 주행 알고리즘 고도화로 화성 영토 확장 예고
매핑부터 3D 지도 제작까지 '자율 탐사 4단계' 수립…실제 지형 테스트로 검증 완료
독일·스페인 컨소시엄 기술력 입증…자율 주행 알고리즘 고도화로 화성 영토 확장 예고
 이미지 확대보기
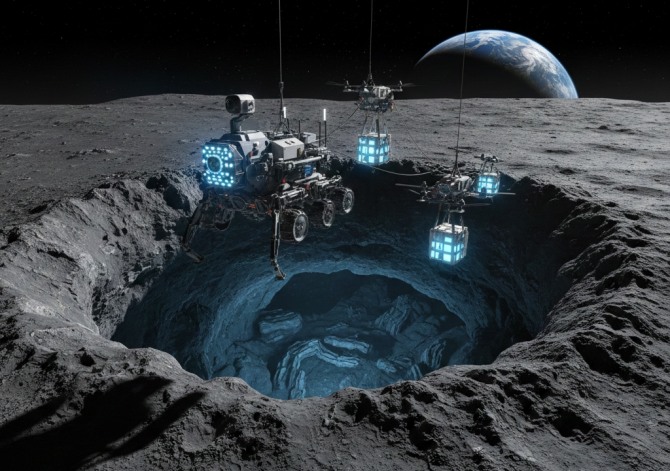
이미지 확대보기이 지하 구조물은 우주비행사를 괴롭히는 치명적인 우주 방사선과 잦은 운석 충돌로부터 신체를 보호할 수 있는 자연적인 방패 역할을 하기 때문이다.
보도에 따르면 한 지형과 진입의 어려움으로 인해 그간 탐사가 불가능에 가까웠던 이곳에 최근 스마트 로봇 세 대가 투입되면서 인류의 영토 확장에 청신호가 켜졌다.
자율 탐사의 4단계 로드맵: 매핑에서 심층 조사까지
이번 임무는 정교하게 설계된 네 단계의 자율 탐사 과정을 거친다.
1단계: 로봇들이 협력해 용암 터널 입구 주변의 지형을 정밀하게 매핑한다.
2단계: 센서가 탑재된 페이로드 큐브를 동굴 안으로 투하해 기초 데이터를 수집한다.
3단계: 특수 제작된 정찰 로버가 좁고 위험한 입구를 통해 동굴 내부로 직접 하강한다.
4단계: 로봇 팀이 터널 내부를 심층 탐사하며 상세한 3D 지도를 제작해 기지 건설 가능성을 타진한다.
실제 환경 테스트 완료…기술적 실현 가능성 확인
사이언스데일리에 따르면 인공지능 연구센터(DFKI)와 말라가 대학교(UMA), 스페인 기업 GMV로 구성된 컨소시엄은 2023년 2월, 지구상에서 달 지형과 가장 유사한 란사로테에서 현장 테스트를 성공적으로 마쳤다. 이 테스트를 통해 협업 로봇 시스템이 실제 극한 환경에서도 자율적으로 임무를 수행할 수 있음이 입증되었다.
우주 로봇 기술의 진화와 인재 양성
말라가 대학교(UMA)의 우주 로봇 연구실은 유럽 우주국(ESA)과 협력해 로버의 경로 계획 및 자율 작동 알고리즘을 개발하며 이 분야를 선도하고 있다. 특히 연구소 측은 차세대 엔지니어 양성을 위해 학생들을 실무 프로젝트에 대거 투입하고 있으며, 기업과의 기술 이전을 통해 연구 성과를 실제 우주 산업으로 연결하는 데 주력하고 있다. 이러한 노력은 향후 달을 넘어 화성 탐사 임무에서도 자율 로봇 팀이 핵심 역할을 수행하는 밑거름이 될 전망이다.
이태준 글로벌이코노믹 기자 tjlee@g-enews.com















{kind=link}